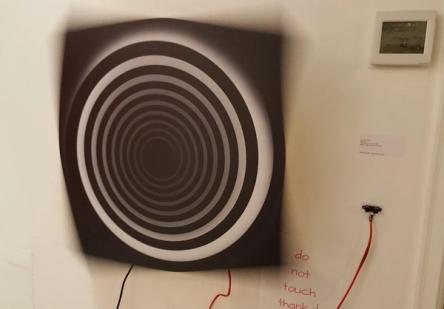
Painting spinning mechanism for artist Nadia Shinkunas
Custom electronics and mechanical system to spin a painting at different speeds based on distance sensor. Commissioned by artist Nadia Shinkunas and shown at the Little Gallery & Benson Underground Film Forum in Omaha, NE.
Fabrication
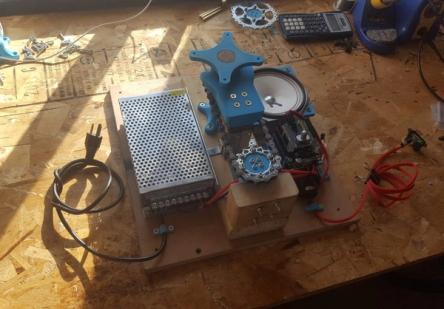
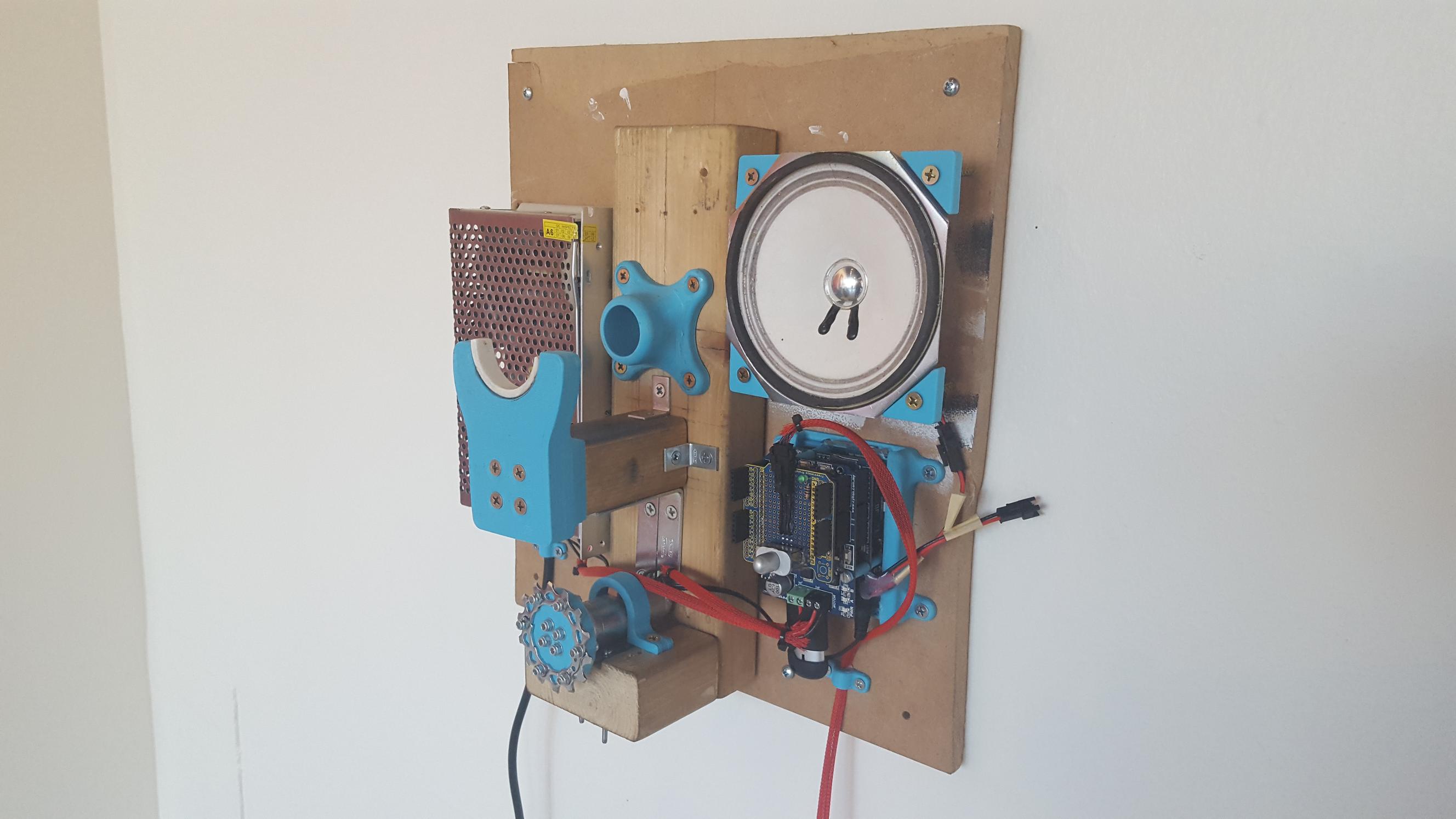
This piece uses a mix of custom-designed 3D-printed pieces, bicycle sprockets and chains, and wood. The whole system was mocked up in Fusion 360 so I could refine and check the parts before 3D printing them.
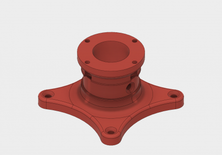
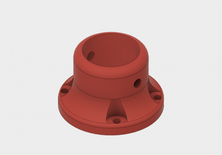
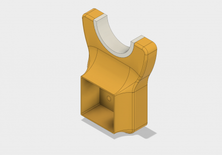
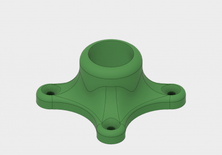

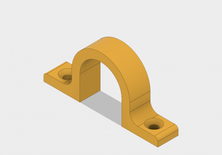
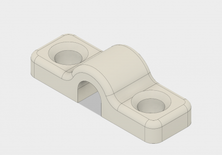
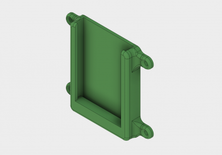
Assembling the mechanism after 3D printing the custom parts and installing the bicycle sprockets.










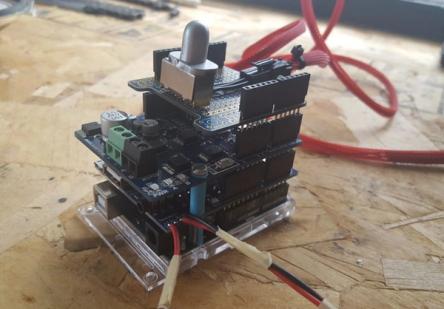
Electronics
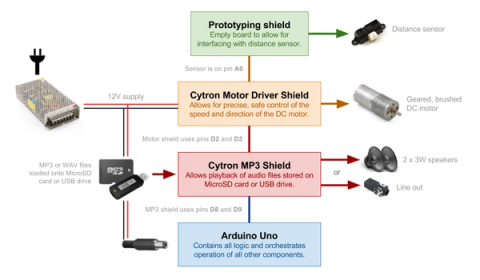
A geared DC motor was used to drive the bike chain and spin the painting, controlled by an Arduino. The Arduino took readings from an infrared distance sensor and spun the painting faster the closer a viewer gets.